
Driving a vibrating motor directly from an Arduino is possible without burning it.
Using a 75 Ohms series resistor the current can be maintained under 40 milliams (ATMEGA238 max. limit).
The motor speed can be controlled using a Potentiometer to adjust the PWM signal.
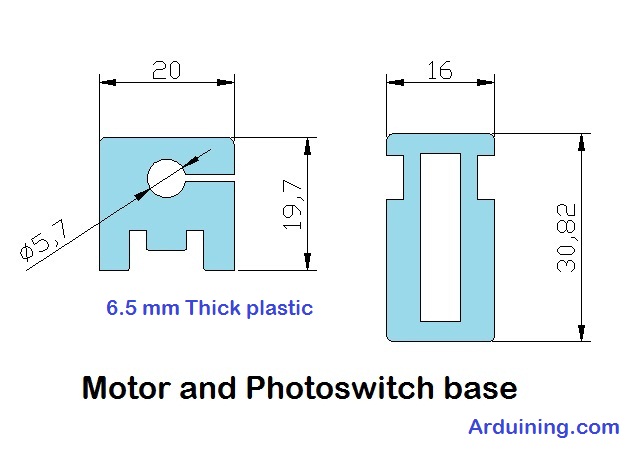
A Photoswitch detects the slot in the wheel for revolutions counting.

The yellow Led toggles every 30 revolutions.
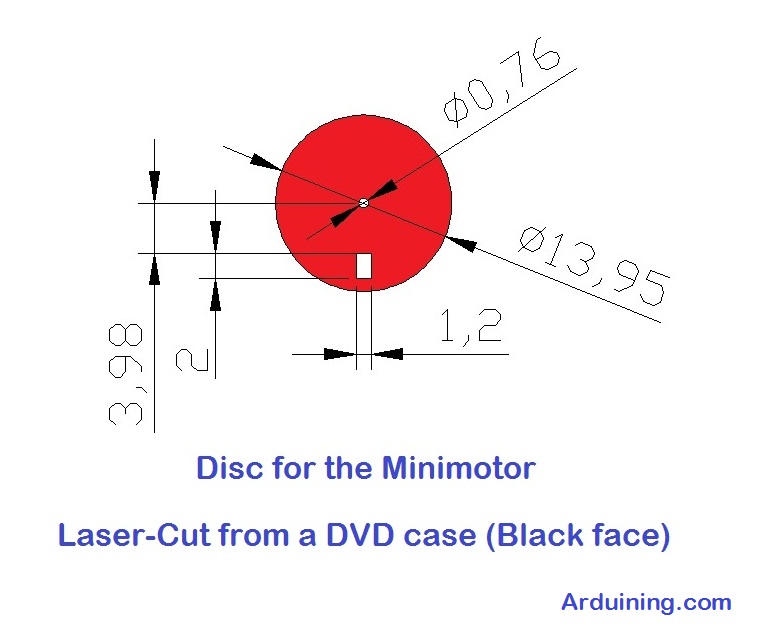
Removing the offset weight, a no easy task.

Some Laser Cutting was done before put together all parts.
How was connected to the Arduino pins:

The final Assembly:

The sketch used in the YouTube demostration:
/*------------------------------------------------------------------------------ MiniMot_10 Arduining.com 05 APRIL 2013 The excentric mass is replaced by a disk in a Mini Vibrating Motor. A Motor Revolutions Counter is implemented using a photoswitch. The Motor speed is controlled with a potentiometer. A led is toggled every 30 revolutions to show the motor speed. The PWM value is transmited to the Serial monitor. Arduino (ATMEGA328)drives directly the Motor, a series resistor of 75 ohms limits the current to 40 milliamps. -----------------------------------------------------------------------------*/ #define MOT1 9 //Pin directly connected to the Motor. #define MOT2 10 //Pin connected to the Motor trhought a 75 Ohms resistor. #define LED 7 //Pin connected to the LED. #define POT 0 //Analog input for the potentiometer. #define PhotoSwitch 8 //Pin connected to the photoswitch. #define TURNS 30 //Number of turns to toggle the LED. int Counter; //Revolutions counter. int PWMval; //PWM Value to control the motor speed. boolean WaitSlot= true; //Flag used for slot detection. boolean LedState= 0; //1= on , 0= off void setup() { pinMode(LED, OUTPUT); pinMode (PhotoSwitch, INPUT); Serial.begin(9600); analogWrite(MOT2, 0); //pin 2 of the motor grounded. } void loop() { PWMval=analogRead(POT)/4; //read potentiometer. analogWrite(MOT1,PWMval); //set the motor speed. if (!digitalRead(PhotoSwitch) && WaitSlot){ //slot detection! Counter++; WaitSlot=false; if (Counter == TURNS){ LedState = !LedState; // toggle the Led state. digitalWrite(LED,LedState); Serial.println(PWMval); Counter=0; //Reset the revolutions counter. } } else if (digitalRead(PhotoSwitch)) WaitSlot= true; //No slot. }
